Processos sempre precisam se comunicar, essa comunicação deve ser bem definida e estruturada de maneira a garantir que haja um bom desempenho e, principalmente, que os processos não entrem em condições de corrida. Condições de corrida ocorrem quando dois ou mais processos estão lendo ou escrevendo dados em um espaço de memória compartilhado e o resultado final depende de qual processo executa e quando ele executa.
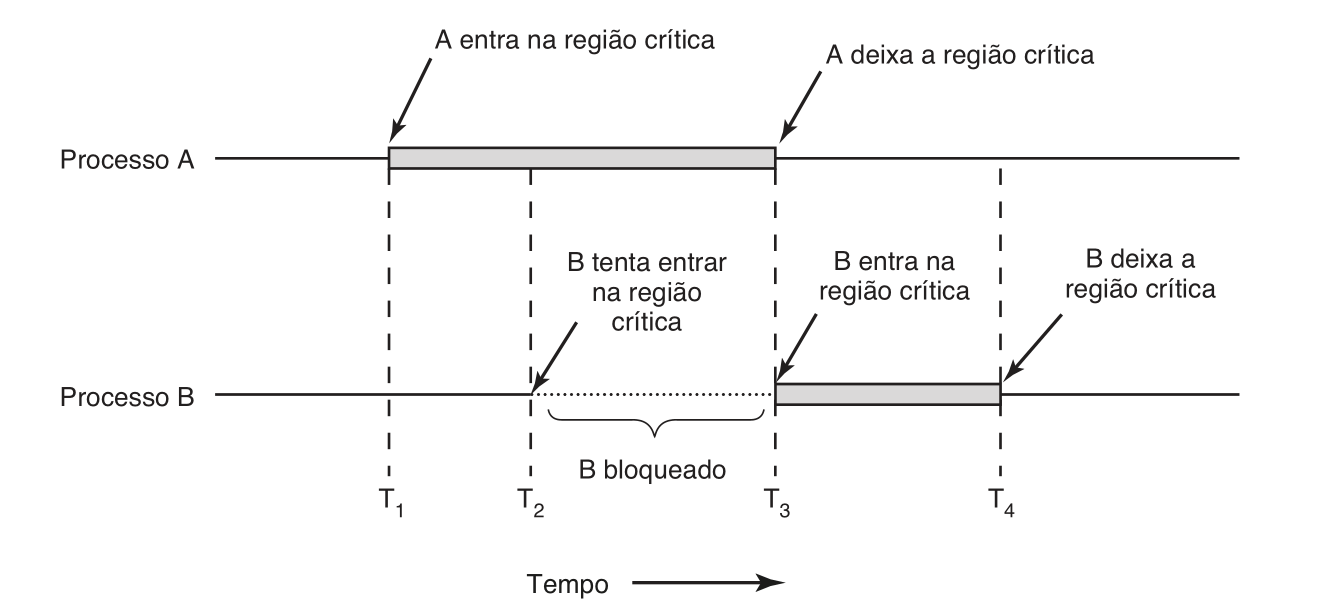
Uma maneira de evitar as condições de corrida, isto é, atingir a exclusão mútua no acesso a áreas de memória compartilhadas, é através da implementação do conceito de regiões críticas. Região crítica é o nome dado a qualquer parte do programa executado por um processos onde a memória compartilhada é acessada ou onde podem ocorrer quaisquer condições de corrida.
Uma boa solução utilizando o conceito de região crítica precisa estar em conformidade com quatro condições:
- Dois processos jamais podem estar simultaneamente dentro de suas regiões críticas.
- Nenhuma suposição pode ser feita a respeito de velocidades ou número de CPUs.
- Nenhum processo executando fora de sua região crítica pode bloquear qualquer processo.
- Nenhum processo deve ser obrigado a esperar eternamente para entrar em sua região crítica.
Espera ocupada
Nesse tipo de implementação, quando um processo deseja entrar na sua região crítica, ele verifica se a entrada é permitida. Caso ele não possa entrar na região crítica no dado momento, ele entra em um laço de espera até que seja possível entrar. Em geral e a espera ocupada não é eficiente e desperdiça tempo de CPU.
Desabilitando interrupções
Quando um processo entra em sua região crítica ele desabilita todas as interrupções do sistema (inclusive as interrupções de clock), dessa forma ele não pode ser interrompido até finalizar a operação.
O problema dessa solução é que ela funciona apenas para sistemas de processador único. Em sistemas multiprocessados desabilitar as interrupções de uma CPU não impede que processos sendo executados em outras CPUs entrem na região crítica enquanto outro processo já está nela.
Outro ponto contrário a essa implementação é o aspecto de segurança. É muito imprudente permitir que um programa de usuário desabilite todas as interrupções do sistema, pois isso permite a ele o monopólio da CPU com a garantia de que nunca será interrompido.
Variáveis de trava
Nessa solução está presente uma única variável compartilhada chamada de variável de trava. Quando um processo quer entrar em sua região crítica ele verifica o valor da trava. Se a trava é 0 o processo muda seu valor para 1 e entra na região crítica. Se a trava é 1 o processo espera até que ela se torne 0.
A solução com variáveis de trava também não é muito atrativa, pois enfrenta exatamente os mesmos problemas de concorrência, porém dessa vez eles estão relacionados ao estado da variável de trava. É possível que um processo verifique que a trava é 0 para entrar na região crítica e, antes de configurar a trava para 1, ele é interrompido e outro processo entra em execução, este também verifica que a trava é 0 e entra na região crítica, logo após isso o outro processo retoma sua execução e termina de configurar a trava para 1, agora os dois processos estão na região crítica ao mesmo tempo.
Alternância explícita
Nessa solução uma variável turn controla qual processo pode entrar na região crítica em um dado momento. Com a alternância explícita cada processo recebe uma chance alternada de entrar em sua região crítica. O problema dessa solução é que nem sempre é necessário alternar, e se um processo for muito mais lento que o outro pode haver um gargalo no sistema.
Solução de Peterson
Nessa solução são usadas duas rotinas enter_region e leave_region. A chamada enter_region faz o processo esperar até que seja seguro entrar na região crítica e retorna quando for possível entrar. A chamada leave_region indica que o processo terminou seu trabalho na região crítica e que agora outros processos podem utilizá-la.
Uma possibilidade de implementação dessa solução é usando uma instrução TSL (Test and Set Lock) que verifica se o valor da trava LOCK era 0 e, em caso afirmativo, atribui um valor diferente de 0 para a trava. O importante aqui é que a instrução TSL é atômica, ou seja, é de fato uma única instrução executada pelo processador implementada em nível de hardware. Dessa forma não é possível haver condições de corrida ao verificar e atualizar a trava.
Sleep/Wake up
Esse tipo de solução é parecida com as soluções de espera ocupada, porém, ao invés de entrar em um laço de espera, os processos que estão na fila para entrar na região crítica são bloqueados pela chamada de systema sleep e desbloqueados por uma chamada wakeup quando puderem entrar na região.
Semáforos
Semáforos utilizam as primitivas de sleep/wake up, mas fazem isso de uma forma mais elaborada. De forma geral semáforo é uma variável utilizada para controlar o acesso a recursos compartilhados (originalmente utilizada para armazenar o número de wake ups armazenados para uso futuro). Se uma variável semáforo tem o valor 0, isso indica que não o recurso não está disponível, caso contrário há algum recurso livre e existem um ou mais wake ups a serem executados.
Semáforos possuem duas operações down e up, ambas generalizações das operações sleep e wakeup. É importante destacar que essas operações são implementadas como uma única instrução atômica, garantindo que se uma operação de semáforo tenha começado, ela não será interrompida. Essas operações geralmente são implementadas como chamadas de sistema, permitindo que o núcleo desabilite as interrupções enquanto está verificando o semáforo. Além disso é possível ainda proteger os semáforos com instruções TSL.
A operação down em um semáforo é uma tentativa de uso de algum recurso. A operação verifica se o valor atual é maior do que 0, se esse for o caso então o valor do semáforo é decrementado e a execução continua. Se o valor do semáforo for 0 em uma operação down, o processo é colocado para dormir sem completar o down.
A operação up em um semáforo incrementa o valor atual, indicando que algum recurso foi liberado. Se há processos dormindo nesse semáforo, o a operação escolhe um deles e o acorda (permitindo que o processo acordado complete a operação down e decremente o semáforo).
Um semáforo usado especificamente para a exclusão mútua do acesso uma região crítica possui apenas dois valores possíveis 0 ou 1. Esse tipo de semáforo é chamado de mutex.
Passagem de mensagem
A troca de mensagens permite a comunicação de processos não só em uma mesma máquina, mas também em um ambiente de sistemas distribuídos.
Essa solução usa duas operações primitivas send e receive, geralmente implementadas como chamadas de sistema.